Rotation Groups
On this page consider
groups which represent rotations.
As we have seen on this page part of the definition of groups is that they contain objects and a binary operation on those objects, in the rotational case:
- The objects are rotations.
- The binary operation is the sequential application of two rotations.
These types of groups are defined in a way that is independent of the number of dimensions and also independent of the algebra used to represent it. However, for any given dimension, we need to have a mapping back to an appropriate algebra to do calculations. This definition often combines various types of algebra such as matrices who's elements are complex numbers although we could reverse this and use complex numbers who's elements are matrices.
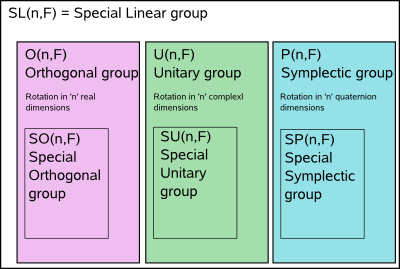
These rotation groups are all subsets of the SL(n,F) Special Linear group.
Although these groups all represent rotations, around the origin, they may have different properties, for instance, each object in the group may correspond exactly to one rotation. That is, these is a 1:1 correspondence between objects in the group and rotations, this is known as a single cover. A double cover is where there are two objects which correspond to each rotation, this is related to spinors which is 1:1 but a complete rotation is 720° and a 360° rotation will multiply the object by -1.
These might be mapped to different algebras if different ways, for example, a rotation in 3D can be represented by either:
- A 3×3 matrix of real numbers.
- A 2×2 matrix of complex numbers.
- A 1×1 matrix of quaternions. (i.e. a single quaternion).
I think the top one could represent a single cover and the other two are examples of a double cover.
These contain more scalar values than there are degrees of freedom. For instance 3D rotations have 3 degrees of freedom but the groups have 9, 8 or 4 scalar numbers, so we need to have various restrictions to reduce the degrees of freedom:
| |
The orthogonal group, SO(n) |
The unitary group, SU(n) |
The symplectic group, Sp(n) |
| matrix restrictions |
T Tt = Tt T = 1
determinant = +1 |
T T* = T* T = 1 |
T T* = T* T = 1 |
| number restrictions |
|
unit length |
unit length |
| |
|
|
|
where:
U* = the conjugate transpose of U (the conjugate transpose is also known as adjoint matrix, adjugate matrix, hermitian adjoint or hermitian transpose). The conjugate matrix is the complex conjugate of each element.
For rotation groups, such as SO(3), the elements and group law is as follows:
- elements:
set of all rotations of sphere
- group
law: composition of rotations.
There are at least 3 classical groups types associated with rotations:
| group type |
matrix definition |
clifford algebra definition |
SO(n, ) )
The group of rotations in 'n' real dimensions.
The special orthogonal group in 'n' dimensions over the real numbers.
Represents a single cover of rotations in 'n' dimensions of Euclidean space (all dimensions square to +ve). |
An n×n matrix where each element of the matrix is a real number
The determinant of the matrix is +1.
The transpose of the matrix multiplied by the original matrix = identity. |
|
SU(n)
The group of rotations in 'n' complex dimensions.
The special unitary group in 'n' dimensions.
S=special (no reflections)
U=unitary=size preserving
n=number of complex dimensions
Represents a double cover of rotations in 'n²-1' dimensions.
Or a single cover of rotations where a complete rotation is 720°. |
An n×n matrix where each element of the matrix is a complex number
The determinant of the matrix is +1. |
|
SP(n)
The group of rotations in 'n' quaternion dimensions.
The symplectic group in 'n' dimensions |
An n×n matrix where each element of the matrix is a quaternion
The determinant of the matrix is +1. |
|
G2,F4,E6,E7 and E8
The group of rotations in 'n' octonion dimensions. (only works for 5 values of n)
Can this be a group because a group must be associative and octonions are not associative. It can be done but only in these exceptional cases. |
An n×n matrix where each element of the matrix is an octonion
The determinant of the matrix is +1. |
|
Special Orthogonal Groups
Here is more detail on special orthogonal groups in particular dimensions. These groups are Lie groups and the number of generators is given:
| group type |
number of generators
n!/(n-2)!*2 |
matrix definition |
clifford algebra definition |
SO(1,)
|
|
|
|
SO(2,)
The group of rotations in 2 real dimensions. Single cover of rotation in 2 dimensions |
1 |
| cos(θ) |
-sin(θ) |
| sin(θ) |
cos(θ) |
|
C (unit length) |
SO(3,)
The group of rotations in 3 real dimensions. Single cover of rotation in 3 dimensions |
3 |
| 1 - 2*qy2 - 2*qz2 |
2*qx*qy - 2*qz*qw |
2*qx*qz + 2*qy*qw |
| 2*qx*qy + 2*qz*qw |
1 - 2*qx2 - 2*qz2 |
2*qy*qz - 2*qx*qw |
| 2*qx*qz - 2*qy*qw |
2*qy*qz + 2*qx*qw |
1 - 2*qx2 - 2*qy2 |
rotation in terms of quaternion. |
H (unit length)
Operation is sandwich product. (otherwise this would give a dual cover as SU(2) does. |
SO(4,)
The group of rotations in 4 real dimensions |
6 |
|
|
The special orthogonal group can also be defined over the complex numbers: SO(n,C) is this the same as SU(n)???
Rotations in Minkowski Space
So far we have been talking about Euclidean space, that is, a space where all dimensions square to positive. If we want rotation in a space where p dimensions square to +ve and q dimensions square to -ve, Minkowski space, then we can extend SO(n) to SO(p,q) (defined with two numbers, p is the number of dimensions which square to +ve,q is the number of dimensions which square to -ve). The orthogonal group for any symmetric quadratic form Q with the group of matrices A which preserve Q, is denoted O(p,q).
| |
matrix definition |
clifford algebra definition |
| Clifford algebra of the Euclidean space R3 |
Mat(2,C) |
Cl(3) |
Clifford algebra of the Minkowski space R 1,3 |
Mat(2,H) |
Cl(1,3) |
Clifford algebra of the Minkowski space R 3,1
The Lorentz group is O(3,1) |
Mat(4,
) |
Cl(3,1) |
Special Unitary Groups
What exactly does it mean "rotation in 'n' complex dimensions"? For instance, since a complex number has one real and one imanginary number, does rotation in 2 complex dimensions mean rotation in a space where 2 dimensions square to +ve and two square to -ve? or since its represented by quaternions does it mean rotation in a space where 2 dimensions square to +ve and two square to -ve? I don't think so, I think there is some mapping into euclidean space implied.
Here is more detail on special unitary groups in particular dimensions. These groups are Lie groups and the number of generators is given:
| group type |
number of generators (n²−1) |
matrix definition |
clifford algebra definition |
SU(1)
The group of rotations in 1 complex dimension. This is a trivial group having only one element. |
1 |
|
|
SU(2)
The group of rotations in 2 complex dimensions
2 complex dimensions = quaternion ? Almost identical properties to R(3)
except repeats after 720 degrees rather than 360 degrees. Represents double cover of rotations in 3 dimensions: Spin(3) |
3 |
{U Mat(2,C) | U†U=I,det U=+1} Mat(2,C) | U†U=I,det U=+1} |
H (unit length)
Cl+3 |
SU(3)
The group of rotations in 3 complex dimensions. Represents double cover of rotations in 8 dimensions.
The analog of the Pauli matrices for SU(3) are Gell-Mann matrices. |
8 |
|
|
| |
|
|
|
I think that, for the SU(n) groups the matrix is used differently than the matrices in the SO(n) group. In the SU case the matrix might be used in sandwich form v' =M v M† to represent classical rotations or v' =M v to represent spinors.
Exceptional Groups: G2,F4,E6,E7 and E8
Can this be a group because a group must be associative and octonions are not associative. It can be done but only in these exceptional cases.
| group |
description |
dimension |
|
|
| G2 |
The automorphism group of the octonions.
SO(O) ~= SO(8) is the rotation group of the octonions,
viewed as a real vector space. The map from Spin(8) to SO(O) is 2:1,
but when we restrict it to G2 we get a 1:1 map. |
14 |
|
|
| F4 |
isometry group of the projective plane over
the octonions.
F4 ~= SO(O) O³ ~= SO(O)O² O³ ~= SO(O)O² |
52 |
|
|
| E6 |
the isometry groups of projective planes over the bioctonions, CO |
78 |
|
|
| E7 |
the isometry groups of projective planes over the quateroctonions, HO |
133 |
|
|
| E8 |
the isometry groups of projective planes over the octooctonions, OO |
248 |
|
|
Background Information
Rotations of objects in 3 dimensional space can be combined so that two or
more rotations can be combined to produce a single rotation which is equivalent
to any sequence of rotations. This site covers several methods for representing
and concatenating rotations, for example:
Since these notations can be used to represent the same physical operation
(rotations in 3D) is is not surprising that they have common properties. It
may be useful to express the properties of these operations independently of
the details of the above notations and so the Rotation group is useful.
Three dimensional rotations are transformations which can be used to transform
say a point from one 3 dimensional coordinate to a possibly different coordinate,
indeed it can transform whole sets of points such as a solid object. Rotations
have properties such as preserving length and angles.
Relationship to Spinors
| |
|
|
| S1 |
|
|
| S2 |
C |
|
| S3 |
H |
|
| S4± |
H |
|
| S5 |
H² |
|
| S6 |
C4 |
|
| S7 |
O |
|
| S8± |
O |
|
| S9 |
O² |
|
| S10 |
(CO)² |
|
| S11 |
(HO)² |
|
| S12± |
(HO)² |
|
| S13 |
(H²O)² |
|
| S14 |
(C4O)² |
|
| S15 |
(OO)² |
|
| S16± |
(OO)² |
|
Relationship between vectors and spinors holds true in 3,4,6 and 10 dimensions (one more than the dimensions of
,C,H and O which gives the following isomorphisms:
SL(2,
)
~=SO(2,1)
SL(2,C)
~=SO(2,3)
SL(2,H)
~=SO(2,5)
SL(2,O)
~=SO(2,9)
Special Displacements
| SE(3) |
group of special displacements
They form the even Clifford subalgebra C+(P3) |
|
| |
|
|
This site may have errors. Don't use for critical systems.