To give us quantities to work with vectors can be represented by a linear combination of basis vectors, so vector 'a' could be represented by:
a = a1 e1 + a2 e2 + a3 e3 ...
similarly vector 'b', in the same coordinate system, could be represented by:
b = b1 e1 + b2 e2 + b3 e3 ...
where:
- a and b = vectors being defined
- a1 ,a2 , a3 , b1 ,b2and b3 = scalar values
- e1 , e2 and e3= common vector bases
Inner Product
We have already covered the dot product '•' for vectors here. This concept can be extended to tensors.
Inner Product of Vectors
So using the above values we have:
a • b = (a1 e1 + a2 e2 + a3 e3) • (b1 e1 + b2 e2 + b3 e3)
If we assume that the bases are orthogonal (mutually perpendicular), then, a dot product of a base with another will be zero except a base with itself which will be one:
e1 • e1 + e2 • e2 + e3 • e3 = 1
e1 • e2 + e2 • e3 + e3 • e1 = ... = 0
Which gives the result:
a • b = a1 b1 + a2 b2 + a3 b3
Equivalent Matrix Equation
| aT b |
|
Inner Product of Covectors
a • b = (a1 e1 + a2 e2 + a3 e3) • (b1 e1 + b2 e2 + b3 e3)
So what is the product covector bases?
e1 • e1 = ?
e1 • e2 = ?
Equivalent Matrix Equation
| a bT |
|
Vector times covector:
|
• |
|
= |
|
Tensor Product
This denoted by ![]() , it is a more general case of the Kronecker product, it takes the right hand operand and duplicates it in every element of the left hand operand. Each of these copies is scalar multiplied by the corresponding element.
, it is a more general case of the Kronecker product, it takes the right hand operand and duplicates it in every element of the left hand operand. Each of these copies is scalar multiplied by the corresponding element.
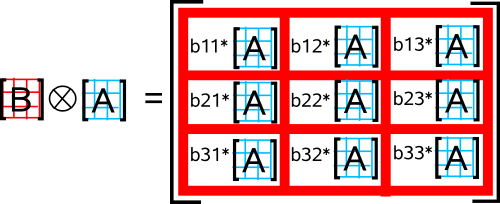
The tensor product may increase the dimension or the rank of the result depending whether the multiplicands have common or independent bases.
In the above example, both the operands are rank 2 and they both use the same bases, if the operands are 3×3 matrices the result is a 9×9 matrix. So, if we use the same bases, a matrix of dimension m by n ![]() a matrix of dimension u by v will give a resultant matrix of dimension m*u by n*v.
a matrix of dimension u by v will give a resultant matrix of dimension m*u by n*v.
In the case below, the two vectors have different bases, shown as a column vector ![]() row vector which gives a matrix:
row vector which gives a matrix:
|
|
= |
|
So if we have independent basis vectors, say ei,ej and ek so the result will contain all the bases in all the operands, eij![]() ek=eijk
ek=eijk
In other words, if all the bases of the operands are independent, the rank of the result will be the sum of the ranks of the operands.
So in terms of the vectors defined at the top of the page, we have:
a ![]() b = (a1 e1 + a2 e2)
b = (a1 e1 + a2 e2) ![]() (b1 e1 + b 2 e2)
(b1 e1 + b 2 e2)
a ![]() b = a1*b1 (e1
b = a1*b1 (e1![]() e1) + a1*b2 (e1
e1) + a1*b2 (e1![]() e2) + a2*b1 (e2
e2) + a2*b1 (e2![]() e1) + a2*b2 (e2
e1) + a2*b2 (e2![]() e2)
e2)
Other Tensor Products
Inner tensor product or contraction
by a vector decreases the rank of a tensor
Outer tensor product
by a vector increases the rank of tensors.
Wedge Product
Two dimentional case
As we did for the tensor product we can take the vectors defined at the top of the page, and multiply them out:
a ^ b = (a1 e1 + a2 e2) ^ (b1 e1 + b 2 e2)
a ^ b = a1*b1 (e1^e1) + a1*b2 (e1^e2) + a2*b1 (e2^e1) + a2*b2 (e2^e2)
the difference from the tensor product is that the square of a vector is zero (as cross product in 3 dimensions) which gives:
e1^e1 = e2^e2 = 0
so:
a ^ b = a1*b2 (e1^e2) + a2*b1 (e2^e1)
also it anti-commutes so:
e1^e2= - e2^e1
which allows us to simplify to:
a ^ b = (a1*b2 - a2*b1)(e1^e2)
However it won't simplify any further, in other words e1^e2 cant be defined in terms of e1and e2 separately.
Three dimentional case
As we did for the tensor product we can take the vectors defined at the top of the page, and multiply them out:
| a ^ b = | (a1 e1 + a2 e2+ a3 e3) ^ (b1 e1 + b 2 e2+ b 3 e3) |
| a ^ b = | a1*b1(e1^e1) + a1*b2(e1^e2) + a1*b3 (e1^e3) + a2*b1(e2^e1) + a2*b2(e2^e2)+ a2*b3(e2^e3) + a3*b1(e3^e1) + a3*b2(e3^e2)+ a3*b3(e3^e3) |
as before:
e1^e1 = e2^e2 =e3^e3 = 0
and
eu^ev= (-1)nm ev^eu
which allows us to simplify to:
| a ^ b = | (a1*b2- a2*b1)(e1^e2) + (a2*b3 - a3*b2)(e2^e3) + (a3*b1 -a1*b3 )(e3^e1) |
as before this won't simplify any further, in other words e1^e2 , e2^e3
and e3^e1cant be defined in terms of e1, e2 and e3 separately.
Exterior Product
p-form and q-form
Triple Product
If
t = u • (v × w)
then in tensor notation:
t = ui eijk vj wk = eijk ui vj wk
