Prerequisites
If you are not familiar with vectors this subject you may like to look at the following page first:
If you are not familiar with vectors this subject you may like to look at the following page first:
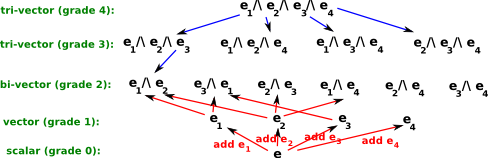
For 4 dimensions can be generated by 4 basis vectors, e1, e2, e3 and e4 this means that a 4D multivector is represented by 16 scalar numbers:
The pages below this explain in detail:
| Choice of bivector and tri-vector basis | Here I have described how the order of the indexes was chosen. For instance, why don't we use e214 instead of e124? Unlike 3D multivectors there is no correspondence with cross multiplication as cross multiplication does not apply in 4D. Also I cant work out how to make the multiplication table symmetrical. Also its not possible to make all the e1234 terms on the bottom left to top right diagonal positive as some of these terms anti-commute. |
| Transform | |
| Arithmetic | This gives the rules for addition, subtraction and multiplication of 4D multivectors. |
| Functions | This shows the dual, reverse and conjugate functions of of 4D multivectors. |
| isometries | |
| code | |
| pauli | An alternative notation using a matrix to represent each multvector |
The following table explains the notation for each of the 16 elements as follows:
| grade | base value | numerical value | |
|---|---|---|---|
full |
shortened |
||
| 0=unit scalar | 1 | e | |
| 1=unit length base vectors | e1 | e1 | |
| e2 | e2 | ||
| e3 | e3 | ||
| e4 | e4 | ||
| 2=unit length base bivectors | e1^ e2 | e12 | e12 |
| e1^ e3 | e13 | e13 | |
| e1^ e4 | e14 | e14 | |
| e2^ e3 | e23 | e23 | |
| e4^ e2 | e42 | e42 | |
| e3^ e4 | e34 | e34 | |
| 3=unit length base tri-vector | e3^ e2^ e1 | e321 | e321 |
| e1^ e2^ e4 | e124 | e124 | |
| e4^ e3^ e1 | e431 | e431 | |
| e2^ e3^ e4 | e234 | e234 | |
| 4=unit length base tri-vector | e1^ e2^ e3^ e4 | e1234 | e1234 |
So in this case the number of dimensions is:
In this case the number of scalar values in the multivector is 16 = (1+4+6+4+1)
|
metadata block |
|
| see also: | |
| Correspondence about this page |
|
|
Book Shop - Further reading. Where I can, I have put links to Amazon for books that are relevant to the subject, click on the appropriate country flag to get more details of the book or to buy it from them. |
|
|
Terminology and Notation Specific to this page here: |
|
This site may have errors. Don't use for critical systems.
Copyright (c) 1998-2026 Martin John Baker - All rights reserved - privacy policy.

