There is an alternative way to think of quaternions, imagine a complex number:
n1 + i n2
but this time make n1 and n2 (the real and imaginary parts) to be themselves complex numbers (but with a different imaginary part at right angles to the first), so,
- n1 = a + jc
- n2 = b + jd
If we substitute them into the first complex number this gives,
(a + jc) + i (b + jd)
since i*j = k (see under multiplication) this can be rearranged to give the same form as above.
a + i b + jc + kd
There are a number of notations and ways to think about quaternions:
- As a superset of complex numbers with two additional imaginary values.
- As the product of two independent complex planes.
- As a set of four scalar values with defined rules for combining them, known as euler parameters (as opposed to euler angles)
When we are using quaternions to represent rotations in 3 dimensions, then we restrict the quaternions to unit length and only use the multiplication operator, in this case there are other notations and ways to think about quaternions:
- As a quantity similar to axis-angle except that real part is equal to cos(angle/2) and the complex part is made up of the axis vector times sin(angle/2).
- As a 2x2 matrix whose elements are complex numbers, generated by Pauli matrices.
- As the equivalent of a unit radius sphere in 4 dimensions.
These are all equivalent and in group theory are represented by the group SU(2).
Even when normalised, there is still some redundancy when used for 3D rotations, in that the quaternions a + i b + j c + k d represents the same rotation as -a - i b - j c - k d. At least it does in classical mechanics. However in quantum mechanics a + i b + j c + k d and -a - i b - j c - k d represent different spins for particles, so a particle has to rotate through 720 degrees instead of 360 degrees to get back where it started.
Substructures
Such as subsets, subgroups, subgraphs or one structure inside a different structure. More about subobjects on page here.
This sort of pattern happens across mathematics: set theory, category theory (topos), logic, topology (topological spaces, homotopy) and recursively defined types.
 |
An injective map is sometimes drawn with a hook on the tail. This can form a poset where the inclusion relation on subobjects is:
|
It is useful to draw the power object: Here the poset is a lattice with all meets and joins. |
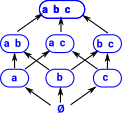 |
If these sets are open sets then this is a topological space. Although to make more interesting topological spaces we may not equate sets with open sets.
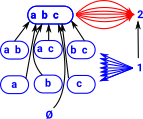 |
Logic: we can have maps (hom set) from the top set (terminal object) to the truth object (Ω) in this case Boolean type (2). These maps correspond to the subsets. |
Product: If we take the product of two line segments we get a square. If we think of the line as a set of points then the product is like a line where each of the points is a line. Like a line of lines. This relates to homotopy. |
