This page is a copy of a paper by Dr Alfred Differ who has kindly given me permission to reproduce it here. He retains the copyright of this paper.
Introduction
to Geometric Algebra (part three)
By adiffer
Sun Oct 20th, 2002 at 11:15:56 AM EST
This article continues to introduce the reader to the basics of geometric algebra. To apply our recent learning and connect to previous knowledge about geometry, we explore the inner and outer products, the projection and dual operations, and representation freedom.
This article builds upon concepts introduced in part one and two. Some of those concepts will be more fully developed now that the reader has had a chance to absorb the routine without being buried in the details. For a reasonable understanding of this section, the reader should have some experience with basic algebra and three dimensional geometry. A practical understanding of trigonometry would also be useful, but not vital. It is possible to understand the content in this section without a strong background in these fields, though, because some effort is made to develop the related ideas.
The purpose of this article is entirely educational. If the reader works to comprehend the content and also works the problems, they will come away with a better understanding of what a geometric algebra is and how they work. Specific goals include the following.
- The reader will understand the motivation to express objects in a representation-free manner.
- The reader will understand what the inner product is and how to use it.
- The reader will understand what the outer product is and how to use it.
- The reader will understand how to work the dual operation.
Section 3: Inner and Outer Products and the Dual operations
----Representation Freedom----
Modern theories of physics all tend to rely upon a belief that the laws expressed in the theory should be invariant with respect to a reference frame in which we choose to represent them. Some physicists will go a step further and state that the laws should be independent of representation all together, even if they don't have a tool to write them that way. Geometric algebras permit a technique for expressing objects while avoiding a choice of representation until the time comes to actually calculate some quantity. They enable the practitioner to avoid explicitly stating a representation too. While this representation-free technique is not fundamentally revolutionary, it does lead to a great reduction of complexity in the notation required to express physical laws.
To a physicist, a reference frame is a set of directions and associated relationships that is used as a backdrop to measure all other objects and interactions. These relations usually include statements requiring the directions to be mutually perpendicular (orthogonality) and have equal length. When a reference frame is chosen, the physical laws and objects can be rendered in that frame. Those renderings are said to be made in a representation.
A plane segment written as M does not explicitly show a reference frame, so the expression is representation-free. That same plane segment written as ∑Mijeij does show the reference frame, so it is not representation-free. Previous statements in earlier sections had equal signs between these two expressions. It would be more accurate to put in a sign that represented a rendering operation into a particular reference frame
Writing in a representation-free style reduces the typographic complexities an author faces when writing expressions. It also reduces the notational clutter a student faces when learning a new concept. These reductions come at a price, however. When the reference frame is explicit, a reader can tell at a glance that M is a plane segment. It is not so obvious in the representation-free style.
In this section and elsewhere, the representation-free style will be used wherever possible. Reference frames will only be shown where there is a significant value added in doing so.
----Prelude----
To properly introduce the inner product, we must develop a part of trigonometry. However, the inner product is not something fundamentally new, so the reader should not be scared off yet. It is a useful combination of regular multiplication and addition, both of which the reader learned about in section one. The inner product happens to reproduce something related to what we mean by 'projection' and trigonometry helps turn geometry's qualitative statements into algebra's quantitative ones.
To start, it is necessary to translate what is meant by projection into our current language. In the purest geometric sense, projection collapses an object onto a reference object. Projecting a line segment onto a reference line produces another line segment that happens to be directed along the reference line. Hold your hand out in sunlight and look at the shadow your palm makes on the ground. The shadow is a projection of a plane segment onto a plane.
----Technical Note----
The shadow of your hand is also a projection of a three dimensional object onto a two dimensional surface. The extra complexity we could explore here won't help us much with our understanding of the inner and outer products, so we will let it drop for now.
The geometric construction for a projected line segment demonstrates a recipe that does not require a numeric measurement of the magnitude called angle. It is assumed the original line segment is drawn at some angle relative to the reference line and that right angles are defined along with some technique for knowing when two angles are of the same size. The recipe for projection will be shown here to set up our meaning for the inner product.
Recipe: Project the line segment AB onto the reference line AO.
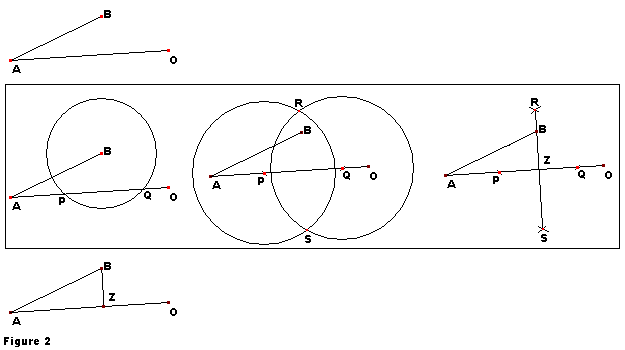
figure 2
Description:
Draw a circle around B large enough to
intersect AO at two distinct points. Label those points P and Q.
Pick one length large enough to act as a radius for circles centered upon P
and Q each and draw them such that the circles intersect at two distinct points.
Label those two intersection points R and S.
The points B, R, and S are collinear. Draw a line segment connecting B, R, and
S. Label where it intersects AO as the point Z.
The line segment AZ is the projection
of AB onto AO.
The line segment BZ is the perpendicular remainder of the projection. BZ is
effectively subtracted from AB to produce AZ.
The first concept we need from trigonometry is a magnitude geometry people refer to as 'angle'. Some would argue that we have already introduced it with our recipe for projection. With trigonometry, however, we must go a step further and define angles numerically. This step is what makes trigonometry a combination of geometry and algebra. Most readers will already have an intuition for this magnitude and what may be done with it. This intuition is rarely complete, though, so more information is developed here to bring everyone to the same level.
The first departure we make from what most readers know is a change of units. We shall measure our angles in radians instead of degrees. A full circle can be thought of as an angle of 360 degrees or 2π radians, so if one should ever wish to convert radians to degrees, multiply our numbers by 360/2π.
The second departure involves definitions for different kinds of angles. Most everyone is familiar with circular angles, but they have rarely seen hyperbolic angles. There are others, but these two will suffice for us. To ensure the reader can differentiate between the two, both will be carefully defined in the algebraic sense.
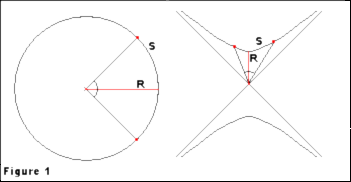
Circular Angle:
Imagine a circle of radius R. Imagine two line segments on that circle that start at the center and end at different points on the circle. The arc length between these two points on the circle has a curved length S. The angle between the two line segments is labeled with θ and is numerically equal to S/R. See the left side of
Hyperbolic Angle:
Imagine a hyperbola drawn with both asymptotic lines sketched in for reference. Also imagine two line segments drawn with the same starting points located at the intersection of the asymptotes and landing at different points on the same section of the hyperbola. Define R as the length of a line segment from the asymptote intersection to the closest point on either section of the hyperbola. The arc length between the two end points has a curved length S. The angle between the two line segments is called θ and is numerically equivalent to S/R. See the right side of Figure 1.
With our concept of a projection and our numeric definition for angles, we can define two pairs of functions that link them and provide the final pieces we need to complete our inner and outer products. Anyone familiar with trigonometry will recognize at least the first pair.
Definition: Cosine(θ)---shorthand notation is cos(θ)
Two line segments sharing a starting point and having two distinct end points can be used to represent a circular angle θ. Project one of the line segments onto the line defined by the other. The cosine of the angle is numerically equal to the length of the line segment projection divided by the length of the line segment before projection.
Note that the circular angle uses the first line segment as a radius for the defining circle and the reference line for later projections.
Definition: Sine(θ)---shorthand notation is sin(θ)
Two line segments sharing a starting point and having two distinct end points can be used to represent a circular angle θ. Project one of the line segments onto the line defined by the other. Draw the perpendicular remainder. The sine of the angle is numerically equal to the length of the perpendicular remainder divided by the length of the line segment before projection.
Note that the circular angle uses the first line segment as a radius for the defining circle and the reference line for later projections.
There are similar definitions for hyperbolic functions where hyperbolic angles are used instead of circular angles. The functions are cosh(θ) and sinh(θ) respectively. It may not be obvious to someone with only a little exposure to trigonometry why we would define hyperbolic versions of the trigonometric functions. They are needed, however, when dealing with inner and outer products of objects that have mixed squares both positive and negative.
----Inner Product---- Formal Definition on Vector Spaces
Now we are finally ready to describe our inner product. There are a few simple things it is expected to do, so they will be given first and then a descriptive definition will be given that satisfies them.
- We expect the inner product of two line segments to produce a number that is equal to the length of both line segments multiplied together times the cosine of the angle between them. This reproduces the dot product defined by users of vectors. Technical Note--- If the line segments have a mix of positive and negative squares, we use cosh(θ) instead. This doesn't happen in R(3,0), but it will in R(3,1).
- We also expect the inner product of two plane segments to be related to the inner product of two related line segments drawn perpendicular to the plane segments in the right handed sense. This expectation is related to the right hand rule invented for cross products of vectors in a three dimensional world.
- Finally, we expect the inner product will usually have a lower ranked result than the ranks of any of the operands. At worst, the result will have a rank equal to the rank of the smallest ranked operand. We expect this behavior because projections should never have a higher rank than the object being projected.
Now it is time to write out the definition for the inner product. We will use the mid-height dot (·) to represent the inner product.
Definition: A · B where A and B are from the same geometric algebra
Rule 1: If A, B are of pure rank then
A · B = 1/2 (AB + BA) if the ranks of A and B add to an even number or
A · B = 1/2 (AB - BA) if the ranks of A and B add to an odd number
Rule 2: If A or B are of mixed rank,
break each into a sum of pure ranked objects and distribute ( ·) across each
sum. After distribution use Rule 1 for each term.
A = ∑ Ai where i = 0, 1, 2, 3 and it represents geometric rank
B = ∑ Bj where j = 0, 1, 2, 3 and it represents geometric rank
So A · B = ∑ Ai ·∑ Bj
= ∑ ∑ Ai · Bj
A few examples will demonstrate whether this definition meets the three expectations we had of it.
Example 11:Perform the inner product for A = e1 + 3e2 and B = 6e2 - 7e3
The sum of the ranks for A and B is two,
so rule one requires the use of the symmetric formula.
A · B = 1/2 [ (e1 + 3e2)(6e2 - 7e3) + (6e2 - 7e3)(e1 + 3e2) ]
= 1/2 [ (6e12 + 18e - 7e13 - 21e23)
+ (-6e12 + 7e13 + 18e + 21e23)
]
= 1/2 [ 18e + 18e ]
= 18e
The rank lowering expectation from expectation three is met. It is not so obvious from this example that expectation one is met, so a couple of examples where the angles between the line segments is known will be given.
Example 12:Perform the inner product for A = 3e1 and B = e3
The sum of the ranks for A and B is two,
so rule one requires the use of the symmetric formula.
A · B = 1/2 [ (3e1 e3) + (e3 3e1) ]
= 1/2 [ 3e13 - 3e13 ]
= 0
The magnitude of this result should be zero and it is. This is due to the fact that the two line segments are perpendicular. This makes the cosine of the angle between then vanish since there is no length to the projected line segment of A onto B. This meets expectation one.
Example 13:Perform the inner product for A = 3e1 and B = 4e1
The sum of the ranks for A and B is two,
so rule one requires the use of the symmetric formula.
A · B = 1/2 [ (3e1 4e1) + (4e1 3e1) ]
= 1/2 [ 12e+ 12e]
= 12e
Note that the result is the product of the norms for A and B. The angle between A and B is zero, so the cosine of the angle is one. This demonstrates expectation one.
Example 14:Perform the inner product for A = 3e12 and B = 4e12 + 5e13
The sum of the ranks for A and B is four,
so rule one requires the use of the symmetric formula.
A · B = 1/2 [ 3e12 (4e12 + 5e13)
+ (4e12 + 5e13) 3e12 ]
= 1/2 [ -12e + 15e1213 -12e + 15e1312 ]
= -12e + 1/2 [ - 15e23 + 15e23 ]
= -12e
Note that the part of B along e13 did not contribute to the result. This can be understood if A and B are recast as line segments. Let A' = e3 and B' = 4e3 + 5e2. The inner product of A' and B' should have no contribution from the second term of B' since it is strictly perpendicular to all of A'. This is how we meet expectation two. There is a formal way to do this once the dual operation is introduced.
Example 15:Perform the inner product for A = e3 and B = e13 + e23
The sum of the ranks for A and B is three,
so rule one requires the use of the antisymmetric formula.
A · B = 1/2 [ (e3)(e13 + e23)-(e13 + e23)(e3) ]
= 1/2 [ (e313 + e323)-(e133 + e233) ]
= 1/2 [ -e1 - e2 - e1 - e2 ]
= -e1 - e2
In this example we see the first case where the projection effect of a higher rank object onto a lower rank object can be seen. The parts of B in the 3-direction were projected out. B itself is a plane segment whose cross section on the 12-plane is a line that runs diagonally between the two axes. The projection effect reduces B to a line segment on that intersection line.
With our definition for an inner product and its relationship to projection, let's look again at example three from section one. In that example, we multiplied two general line segments and wrote a result that avoided expressions that depended on any particular reference frame.
Example 3: (restarted) Multiply two line segments M and N and show the general result.
M N= 1/2( M N + M N) + 1/2( N M - N M)
[Just adding zero]
= 1/2( M N + N M) + 1/2 (M N - N M) [Rearranging]
Because M and N are
line segments, we can use the symmetric version of our definition for the inner
product to rewrite the first term
= M · N + 1/2 (M N - N M)
The first term is a scalar that
must be equal to the product of the lengths of M and N and the
cosine of the angle between them. We know this because we built this expectation
(#1) into the definition of the inner product.
= |M| |N| cos(θ) e + 1/2 (M N - N M)
This works because the length of Npar from section one is |N| cos(θ). We shall leave the second term as a mystery to be finished after the introduction of the outer product.
----Outer Product----
No new concepts need to be introduced here to proceed with a description of the outer product, so readers need not be concerned with figuring out how to conjure rabbits from magic hats without more training. For those that followed the discussion of projection, though, we shall now focus our attention on the perpendicular remainder labeled as line segment BZ and the shape between the two line segments. Outer products emphasize perpendicular remainders while inner products emphasize parallel projections.
There are, however, some expectations for the outer product that are best explained before the definition as we did for the inner product.
- The first expectation we have is that the outer product will usually have a higher ranked result than the ranks of any of the operands. At worst, the result will have a rank equal to the rank of the highest ranked operand. Like the inner product, however, there is a limit to how far this expectation goes. In any geometric algebra there is a highest and a lowest rank object. The outer product will not create anything of a higher rank than the highest rank object. ----Technical Note----In higher dimensional algebras above R(3.0), this first expectation will be weakened a bit. The definition given below can produce multi-ranked results in higher algebras. More advanced students will probably recognize the exterior product of forms anyway.
- For our second expectation, we want the outer product of two line segments to be a plane segment with the same area as the parallelogram defined by the line segments. While the inner product used projection to collapse one object onto another, the outer product builds upward to higher ranks by describing the enclosed space between the two operands. Two adjacent legs and the angle between them give enough information on a parallelogram to know the fence for the area enclosed.
Now it is time to write out the definition for the outer product. We will use the mid-height wedge (^) to represent the outer product.
Definition: A ^ B where A and B are from the same geometric algebra
Rule 1: If A, B are of pure rank then
A ^ B = 1/2 (AB - BA) if the ranks of A and B add to an even number
or
A ^ B = 1/2 (AB + BA) if the ranks of A and B add to an odd number
Rule 2: If A or B are of mixed rank,
break each into a sum of pure ranked objects and distribute ( ^ )
across each sum. After distribution use Rule 1 for each term.
A = ∑ Ai where i = 0, 1, 2, 3 and it represents geometric rank
B = ∑ Bj where j = 0, 1, 2, 3 and it represents geometric rank
So A ^ B = ∑ Ai ^ ∑ Bj
= ∑ ∑ Ai ^ Bj
A few examples will demonstrate how this outer product works and how it meets the expectations listed above.
Example 16:Perform the outer product for A = e1 + 3e2 and B = 6e2 - 7e3
The sum of the ranks for A and B is two,
so rule one requires the use of the antisymmetric formula.
A ^ B = 1/2 [ (e1 + 3e2)(6e2 - 7e3) - (6e2 - 7e3)(e1 + 3e2) ]
= 1/2 [ (6e12 + 18e - 7e13 - 21e23)
- (-6e12 + 7e13 + 18e + 21e23)
]
= 6e12 - 7e13 - 21e23
The rank raising expectation from expectation one is met. It also shows that part of our second expectation is met since A and B are line segments while the result is a plane segment. A simpler example will show that the area of the plane segment is what we want too.
Example 17:Perform the outer product for A = 3e1 and B = e3
The sum of the ranks for A and B is two,
so rule one requires the use of the antisymmetric formula.
A ^ B = 1/2 [ (3e1 e3) - (e3 3e1) ]
= 1/2 [ 3e13 + 3e13 ]
= 3e13
The magnitude of this result should be 3 and it is. This is due to the fact that the two line segments define a rectangular fence that has lengths of 1 and 3 on its sides. Since the rectangle itself has an area of 3, we have met expectation two.
Example 18:Perform the outer product for A = 3e12 and B = 4e12 + 5e13
The sum of the ranks for A and B is four,
so rule one requires the use of the antisymmetric formula.
A ^ B = 1/2 [ 3e12 (4e12 + 5e13)
- (4e12 + 5e13) 3e12 ]
= 1/2 [ -12e + 15e1213 +12e - 15e1312 ]
= 1/2 [ -15e23 - 15e23 ]
= -15e23
In this last example we see that the first term of B did not contribute to the result of the outer product. Since the first term and A involve the same plane segment, they are effectively parallel. Outer products emphasize objects that are effectively perpendicular, so it should not be surprising that the first term of B does not contribute.
Now, let us finish example three from section one from where we left off. With our definition of the outer product, the last mysterious term can be identified.
Example 3: (finished) Multiply two line segments M and N and show the general result.
M N= 1/2( M N + M N) + 1/2( N M - N M) [Just adding zero]
Because M and N are
line segments, we recognize the first term as the inner product.
= M · N + 1/2 (M N - N M)
Because M and N are
line segments, we recognize the second term as the outer product.
= M · N + M ^ N
We have already seen that the inner product produces a scalar in this case that is equal to the product of the magnitudes of the two line segments and the cosine of the angle between them. The fact that the second term is similar with a replacement of sine for cosine and a plane segment for a scalar can be seen if one writes a formula for the area of a parallelogram. When two adjacent sides are known along with the angle between them, the area is the product of the sides and the sine of the angle. This gives us exactly what we wrote for example three in section one.
----Dual Operation----
There is one last operation to describe before we consider the introductory material to be complete. This last operation helps connect low and high ranked objects to one another and the inner and outer products together. With the 'dual' operation, the old definition of the cross product used by a student first learning about vectors can be linked to our outer product. The dual operation is useful in many ways and makes good intuitive sense to boot.
Think about the number of distinct, independent objects of each rank. In a three dimensional world there is one type of scalar, three line segments, three plane segments, and one volume segment. With these eight basis objects, one can write any other object as a linear combination as we did in section one. In a four dimensional world there is one scalar, four line segments, six plane segments, four volume segments and one hypervolume segment.
The number of independent objects of each rank is not mysterious or accidental. These numbers can be found by starting with a set of digits that represent the possible indices. Pick out a number of digits and make a subset. The number of plane segments available is the same as the number of possible distinct two element subsets. The number of volume segments is the same as the number of distinct three element subsets.
----Technical Note----
Those who have already learned about permutations and combinations know the technical details. The number of objects of each rank happens to be the same as the appropriate binomial coefficient.
There is an interesting symmetry in the number of objects of each rank. There is always one scalar and one object of the highest possible rank. The highest possible ranked object is often named a pseudo-scalar when it is convenient to do so. In a three-dimensional world, the volume segment is the pseudo-scalar.
The number of line segments is equal to the number of possible indices while the number of objects with a rank just below the pseudo-scalar is identical. It's as if a mirror was placed in the middle of all the possible ranks. The number of objects of high rank matches up well with objects of lower rank if one counts down from the pseudo-scalar and up from the scalar.
An even more curious symmetry can be found between objects of a particular rank and their pseudo counterparts. If one starts with one basis object and multiplies it by the pseudo-scalar, one gets the pseudo counterpart. This helps us define the dual operation and the operation that takes one input and outputs its pseudo counterpart.
Definition: The dual of an object is the object after it has been multiplied on the left by the pseudo-scalar.
Example 19:Perform the dual operation on A = 4e12 + 5e13
The dual of A is the pseudo-scalar times
A. In R(3,0) the volume segment is the pseudo-scalar.
A' = e123 A = e123 (4e12 + 5e13)
= 4e12312 + e12313
= -4e3 + e2
The dual operation lets us clear up the last bit of mystery surrounding example 14 where we loosely talked about 'recasting plane segments as line segments.' The recasting operation implied is the dual operation just defined.
Example 14 (redone):Perform the inner product for A = 3e12 and B = 4e12 + 5e13
The sum of the ranks for A and B is four, so rule one requires the use of the symmetric formula.
A · B = 1/2 [ 3e12 (4e12 + 5e13) + (4e12 + 5e13) 3e12 ]
= 1/2 [ -12e + 15e1213 -12e + 15e1312 ]
= -12e + 1/2 [ - 15e23 + 15e23 ]
= -12e
Note that we can write A as e123 A' if A' = 3e3 and B as e123 B' if B' = 4e3 - 5e2
So...
A · B = (e123 A') · (e123 B')
The ranks of both terms still add to four, so the same symmetric rule must be
used.
= 1/2[(e123 A') (e123 B') + (e123 B') (e123 A')]
We know from the multiplication table for R(3,0) that the pseudo-scalar e123 commutes with all other basis objects in the algebra, so we can pass it around A' and B' without changing the result.
= 1/2[(e123 e123 A' B') + (e123 e123 B' A')]
= -1/2[ A' B' + B' A']
= - A' · B'
For proof, just work out - A' · B'.
= -1/2[3e3(4e3 - 5e2) + (4e3 - 5e2)3e3]
= -1/2[12e + 15e23 + 12e - 15e23]
= -12e
There are a lot more interesting identities one can find involving the dual, but we shall leave them to the reader or later problems. One curious one is a link between inner and outer products one finds when trying to commute the pseudo-scalar through the operands.
----Technical Note----
The final thing we will say here about the dual operation is that it is a vital link between how students who learn the cross product of vectors handle multiplication and how we do it with geometric algebras. The cross product of vectors takes in two vectors and outputs one defined to be perpendicular to the first pair in a right-handed sense. In our language, the final vector they get is the dual of the plane segment they would have produced if they had used an outer product instead of a cross product. If you know the right-hand rule, your fingers sweep out the plane of the first two vectors and your thumb points in the direction of the result. To us, the fingers sweep out the plane segment and the thumb points in the direction of the dual of that plane segment.
Summary
In this section, the inner and outer products were described and demonstrated with examples. Both were related to numeric angles and the concept of project even though the actual recipes for them do not require such calculations. With both of these secondary products, we cleaned up one example from section one. Finally, the dual operation was defined and demonstrated. With the dual, we cleaned up one mystery about the connection between the outer product and cross products used for vectors.
With a bit of experience with these lessons, a student will have enough of the tools they need to begin using geometric algebras to represent physical objects. Properties and property currents form the foundations of physical theories, so experience with geometric objects and the tools used to manipulate them are necessary before traveling further into the physics we can express using geometric algebras.
----Problems for Section 3----
11: In section three, a recipe was described for projecting a line segment on to a reference line. Write up something similar describing how to project a plane segment onto a reference plane. Remember that you can't use numeric angles when you stick to standard geometric constructions.
12: Find the inner product of A = 16 e - 9 e3 and B = e12 + 4e123.
13: Find the angle between A = 5 e1 - 9 e3 and B = 2e2 - 3e3.
14: What is the length of A = 3 e1 - 4 e2 - 7 e3 after it has been projected onto the 12-plane?
15: Solve for A · (B · C) when A = e1, B = e2, and C = 15e123
16: Find the outer product of A = 16 e - 9 e3 and B = e12 + 4e123.
17: If A, B, and C are line segments, simplify the following expression. A · ( B ^ C ).
18: If A, B are line segments and C is a plane segment, simplify the following expression. A · ( B ^ C ).
19: If A is a plane segment and B, C are line segments, simplify the following expression. A ^ ( B ^ C ).
20: Does the dual operation commute through the inner and outer products in R(3,0)? If so or not, prove it. Does your proof work for other algebras besides R(3,0)?