Common Factor Theorem
(x /\ y) \/ (u /\ v) == (x /\ y /\ v) \/ u - (x /\ y /\ u) \/ v
Duality
reversion ~
| concept | dual | |
|---|---|---|
| /\ | \/ | |
| grade(A) = m | grade(dual(A)) = n - m | |
| 1 | pseudoscalar |
where:
n = dimension of vector space
Join and Meet
These are two operations associated with geometric intersection and union of spaces, they are denoted by:
| Symbol | Spaces | |
|---|---|---|
| Meet | /\ | intersection |
| Join | \/ | union U |
Confusingly meet and join often use the same symbols '/\' and '\/' as the inner and outer products although the results are slightly different. (some books such as Doran and Lasenby invert this and use \/ for meet and /\ for join so we have to be very careful with terminology and notation).
The mathematical structure of meet and join is an example of a lattice,
- Lattices are explained on this page.
- Use of lattices for vector subspaces are explained on this page.
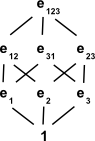
A line on this diagram means that the element at the bottom of the line is a direct factor of the element at the top. There is not a line from e1 to e123 because we don't need to include e1 when e1 is already a factor of e12 and e31.
To calculate the meet we take a line upwards from both operands until we get to the lowest common denominator.
| Meet /\ | 1 | e1 | e2 | e3 | e12 | e31 | e23 | e123 |
|---|---|---|---|---|---|---|---|---|
| 1 | 1 | e1 | e2 | e3 | e12 | e31 | e23 | e123 |
| e1 | e1 | e1 | e12 | e31 | e12 | e31 | e123 | e123 |
| e2 | e2 | e12 | e2 | e23 | e12 | e123 | e23 | e123 |
| e3 | e3 | e31 | e23 | e3 | e123 | e31 | e23 | e123 |
| e12 | e12 | e12 | e12 | e123 | e12 | e123 | e123 | e123 |
| e31 | e31 | e31 | e123 | e31 | e123 | e31 | e123 | e123 |
| e23 | e23 | e123 | e23 | e23 | e123 | e123 | e23 | e123 |
| e123 | e123 | e123 | e123 | e123 | e123 | e123 | e123 | e123 |
To calculate the join we take a line downwards from both operands until we get to the highest common factor.
| Join \/ | 1 | e1 | e2 | e3 | e12 | e31 | e23 | e123 |
|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| e1 | 1 | e1 | 1 | 1 | e1 | e1 | 1 | e1 |
| e2 | 1 | 1 | e2 | 1 | e2 | 1 | e2 | e2 |
| e3 | 1 | 1 | 1 | e3 | 1 | e3 | e2 | e3 |
| e12 | 1 | e1 | e2 | 1 | e12 | e1 | e2 | e12 |
| e31 | 1 | e1 | 1 | e3 | e1 | e31 | e3 | e31 |
| e23 | 1 | 1 | e2 | e2 | e2 | e3 | e23 | e23 |
| e123 | 1 | e1 | e2 | e3 | e12 | e31 | e23 | e123 |